- Виды и назначение автоматических устройств трансформатора
- Классификация и особенности применения
- По назначению и характеру выполняемых работ системы автоматики разделяют:
- →→→
- Для создания стабильности регулируемого параметра применяют различные принципы и методы работы.
- По принципу действия системы автоматики делятся:
- По виду цепи передачи сигналов:
- По количеству обратных связей:
- По управлению:
- По связи выходного и входного параметра:
- По виду источника энергии:
- Автоматическое управление
Виды и назначение автоматических устройств трансформатора
На трансформаторах устанавливаются следующие защиты:
защита от коротких замыканий, влияющая на отключение поврежденного трансформатора и осуществляемая без выдержки времени (для ограничения величин повреждения, а также для предотвращения нарушения бесперебойной работы питающей энергосистемы). Для защиты мощных трансформаторов используются продольные дифференциальные токовые защиты, а для маломощных трансформаторов — токовые защиты со ступенчатой характеристикой выдержки временя. Наряду с того, при всех повреждениях внутри бака и уменьшениях уровня масла используется газовая защита, действующая на неэлектрическом принципе;
защита, от токов внешних к. з., самое важное назначение которой состоит в предотвращении длительного прохождения токов к. з. в случае отказа выключателей или защит смежных элементов путем отключения трансформатора. Кроме того, защита может работать в качестве основной (на трансформаторах малой модности, а также при к. з. на шинах, если отсутствует специальная защита шин). Защиты от внешних к. з. обычно выполняются токовыми или (существенно реже) дистанционными — с выдержками времени;
защита от перегрузок, выполняемая с помощью одного наибольшего реле тока, потому что перегрузка как правило является симметричным режимом. Поскольку перегрузка возможна в течение длительного промежутка времени (десятки минут при токе не больше 1,5Iт,ном ), то защита от перегрузки при наличии дежурного персонала должна выполняться с действием на сигнал, а при отсутствии персонала — на разгрузку или на отключение трансформатора.
На трансформаторах предусматриваются следующие устройства автоматики:
автоматическое повторное включение, назначенное для повторного включения трансформатора затем его отключения максимальной токовой защитой. Требования к АПВ (автоматическое повторное включение) и способы его реализации аналогичны разобранным ранее устройствам АПВ линий. Главная особенность заключается в запрещении действия АПВ трансформаторов при внутренних повреждениях, которые выключаются дифференциальной или газовой защитой; автоматическое включение резервного трансформатора, предназначенное для автоматического включения секционного выключателя при аварийном отключении одного из работающих трансформаторов или при потере питания одной из секций по другим причинам;
автоматическое отключение и включение одного из параллельно работающих трансформаторов, предназначенно для уменьшения суммарных потерь электроэнергии в трансформаторах;
автоматическое регулирование напряжения, предназначенно для обеспечения необходимого качества электроэнергии у потребителей путем изменения коэффициента n трансформации понижающих трансформаторов подстанций, питающих распределительную сеть. Для изменения n под нагрузкой трансформаторы оборудуются РПН (регулятором переключения отпаек обмотки трансформатора под нагрузкой). Автоматическое изменение n осуществляется специальным регулятором коэффициента трансформации (АРКТ), воздействующим на РПН.
Токовая защита трансформаторов выполняется с использованием вторичных максимальных реле тока (прямого или косвенного действия). При этом следует иметь в виду, что трансформаторы малой мощности представляют для токов к. з. очень большое сосредоточенное сопротивление. Поэтому защитоспособность первой ступени (отсечки без выдержки времени) получается удовлетворительной. Учитывая это, защиту обычно выполняют двухступенчатой. Первой ступенью защиты бывает токовая отсечка, ток срабатывания которой выбирается большим максимального тока при к. з. за трансформатором. Чувствительность первой ступени считается удовлетворительной, если kч = 2 при к. з. на стороне высшего напряжения трансформатора. Вторая ступень представляет собой максимальную токовую защиту, выдержка времени которой согласована с выдержками времени защит отходящих присоединений. Чувствительность максимальной токовой защиты проверяется по току при к, з. на стороне низшего напряжения. Работа токовой защиты как резервной проверяется при к. з. в конце элементов, присоединенных к шинам низшего напряжения (при этом желательно иметь kч >= 1.2). При параллельной работе двух трансформаторов следует иметь в виду, что в случае к. з. на низшей стороне максимальные токовые защиты (вторые ступени) трансформаторов могут отключить оба трансформатора. Если имеется секционный выключатель, то этот недостаток устраняется тем, что установленная на нем защита имеет меньшую выдержку времени. Для повышения чувствительности максимальная токовая защита дополняется пуском от реле напряжения обратной последовательности (при несимметричных к. з.) и от реле минимального напряжения (при симметричных к. з.)
При несимметричном к. з. на выходе фильтра ФНОП появляется напряжение, пропорциональное напряжению обратной последовательности, максимальное реле напряжения 2РН срабатывает и обусловливает срабатывание минимального реле напряжения 3РН. Если при этом для реле 1РТ Ip > Ic , p , то защита срабатывает. При симметричном к. з. срабатывает ЗРН и реле тока 1РТ.Ток срабатывания защиты при этом выбирается по условию отстройки от номинального тока, а не от тока самозапуска электродвигателей, питаемых от защищаемого трансформатора, что и обусловливает повышение чувствительности защиты.
Напряжение срабатывания 2РН отстраивается от напряжения небаланса Uнб, раб на выходе фильтра ФНОП в рабочем режиме: Напряжение срабатывания ЗРН отстраивается от минимального значения напряжения в месте установки ТН с учетом самозапуска электродвигателей
Коэффициент чувствительности защиты по напряжению должен быть не ниже kч = 1,2ё1,3, причем kч , при симметричном к. з. можно определять не по напряжению срабатывания минимального реле ЗРН, а по напряжению его возврата, так как симметричное к. з. в начальный момент времени является несимметричным, а следовательно, ЗРН срабатывает в результате срабатывания 2РН. Такое взаимодействие реле повышает чувствительность защиты по напряжению при симметричных к. з.
Если трансформатор с высшим напряжением 110 кВ имеет глухозаземлённую нейтраль, то при однофазном к. з. в сети 110 кВ через нейтраль трансформатора будут проходить токи нулевой последовательности, для отключения которых на трансформаторе устанавливается специальная токовая защита нулевой последовательности. Измерительный орган защиты, которая устанавливается только при наличии питания со стороны НН или СН, состоит из одного реле тока 2РТ подключенного к ТТ, установленному в цепи заземления нейтрали трансформатора. Ток срабатывания защиты выбирается из условия надежной отстройки от тока небаланса в заземляющей цепи при внешних междуфазных к. з. и согласуется с токами срабатывания защит от однофазных к. з., установленных на линиях, примыкающих к защищаемому трансформатору. Значение тока срабатывания обычно находится в пределах 100—200А. Время срабатывания защиты (реле РВ) должно быть на ступень селективности больше времени срабатывания наиболее медленно действующей защиты от однофазных к. з. примыкающих к трансформатору лин-ий электропередачи, При питании трансформатора только со стороны высшего напряжения защита обычно не устанавливается.
Защита трансформатора от перегрузки, выполняемая одним реле, имеет ток срабатыванияНа трехобмоточных трансформаторах с односторонним «питанием защита от перегрузки устанавливается со стороны питания. При существенно различных мощностях обмоток устанавливается дополнительно защита на питаемой обмотке меньшей мощности.
Отрасль техники и науки, которая объединяет теорию и методы проектирования системы автоматики, и устройств, способных выполнять свою основную работу без человека, называется автоматикой.
Классификация и особенности применения
По назначению и характеру выполняемых работ системы автоматики разделяют:
• Системы автоматического контроля служат для контроля некоторого процесса, и включают в себя датчик, усилитель, который принимает сигнал, элемент Р, реализующий последнюю операцию контроля – преобразование результата в удобной форме. Исполнительным элементом может выступать звуковой сигнал, любое другое сигнализирующее устройство (системы сигнализации).
→→→
В автоматическую систему контроля входят распределители, блоки питания, стабилизаторы и другие компоненты. Независимо от числа компонентов такие системы разомкнутые, а сигнал идет в одном направлении: от контролируемого объекта Е к исполнительному компоненту Р.
• Системы автоматического управления служат для управления некоторым техпроцессом, используются для автоматизации процессов запуска, регулировки скорости вращения и реверса электромоторов в приводах механизмов.
Одной из разновидности этой системы является система автоматической защиты. Она предотвращает наступление предельного и аварийного режимов, прекращая в необходимый момент работу.
•Системы автоматического регулирования удерживают регулируемый параметр в определенных пределах. Это является наиболее сложной автоматической системой, которая объединяет в себе управление и осуществление контроля. Одним из компонентов систем является регулятор.
При выполнении этой системой всего одной задачи по поддержанию постоянного значения параметра, они называются системами стабилизации. Имеются процессы, нуждающиеся в изменении параметра по времени. Такие системы получили название систем программного регулирования.
Для создания стабильности регулируемого параметра применяют различные принципы и методы работы.
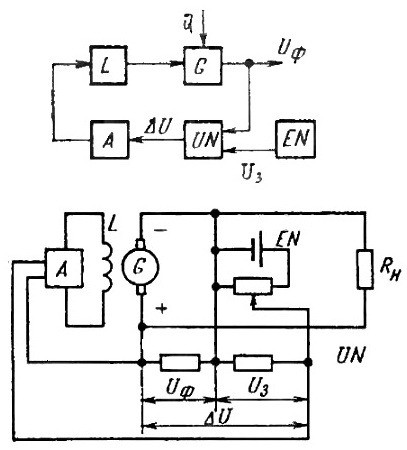
При регулировке по отклонению элемент UN сравнивает действительное напряжение Uф с заданной величиной Uз, определяемой элементом ЕN. После этого на выходе UN возникает сигнал ΔU = Uз-Uф, который прямо зависит от отклонения напряжения. Сигнал протекает через усилитель А, далее идет на рабочий орган L. Из-за колебания напряжения на обмотке, изменяется действительное напряжение генератора, который изменяет его отклонение.

Усилитель, который не меняет принцип работы системы, нужен для ее реализации, в то время, когда не хватает мощности сигнала для действия на рабочий орган.
Вместе с задающим действием на систему влияют факторы, образующие отклонения регулируемого параметра. Изменение температуры внешней среды изменяет сопротивление в схеме обмотки возбуждения. Это оказывает влияние на напряжение генератора. Независимо от того, где будут возникать действия Q, система регулирования среагирует на возникшее отклонение регулируемого параметра.
Регулирование по возмущению нуждается в специальных компонентах, которые измеряют действие Q и влияют на рабочий орган. В системе, действующей по такому принципу, значение регулируемого параметра не берется в расчет. Учитывают только нагрузочный ток Iн. Изменение магнитодвижущей силы возбуждающей обмотки, которая является измерительным компонентом системы, происходит при изменении нагрузочного тока. Это приводит к изменению выходного напряжения генератора.

Комбинированная система образуется объединением разных систем в одну.
По принципу действия системы автоматики делятся:
• Статические системы контролируют регулируемый параметр, который не имеет стабильного значения, и с повышением нагрузки меняется на определенное значение, которое называется ошибкой регулирования. Рассмотренные выше системы – это простые статические системы. Ошибка регулирования возникает из-за большего отклонения напряжения для создания большего тока. Напряжение генератора зависит от нагрузочного тока по прямой зависимости. Максимальное отклонение разности потенциалов называется статизмом системы.
• В астатической системе автоматики разность потенциалов на генераторе изменяется регулировкой реостата R, подключенного в цепь возбуждающей обмотки L.
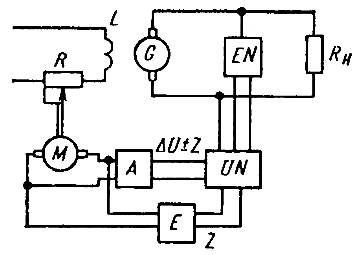
Сервомотор М начинает работать и двигать ползунок реостата, когда возникает сигнал на входе. Ползунок двигается, пока сигнал не обнулится. Система такого типа имеет отличие в том, что для поддержки новой величины тока возбуждения не нужен сигнал на выходе усилителя. Такое отличие и дает возможность избавиться от статизма.
По виду цепи передачи сигналов:
• Разомкнутые. Во время разомкнутой цепи система управления реагирует на воздействия без получения информации о величине регулируемых параметров, и без сравнения результатов работы, а также без возможности корректировки. Такие системы применяются в обеспечении заданной температуры в помещении, в автоматических турникетах и т. д.
• Замкнутые. При замкнутой цепи система управления получает данные о величине параметров, сравнивает их с требуемыми, производит корректировку. Такое замыкание цепи выполняется с помощью обратной связи от управляемой системы к управляющей.
По количеству обратных связей:
• Многоконтурные. Системы, имеющие кроме главного контура обратные связи, называются многоконтурными. В отличие от одноконтурных систем, в многоконтурных системах воздействие к точке системы способно обойти систему и обратно вернуться в первую точку по нескольким различным контурам.
• Одноконтурные. Современные системы автоматики чаще всего имеют параллельные устройства коррекции или обратные связи. Системы, которые регулируют только один параметр с одной обратной связью, называются одноконтурными. В них воздействие на некоторую точку системы может пройти всю систему и обратно вернуться к первой точке, при этом пройдя по одному контуру.
По управлению:
• Следящие системы. К таким системам относятся системы автоматики, в которых сигнал, меняющийся произвольным образом, в результате выходит с допустимой ошибкой. Основной компонент следящей системы – датчик рассогласования. Он определяет ошибку между ведущей и ведомой величинами.
• Программное регулирование. Системы автоматики, заставляющие регулируемый параметр изменяться по заданному программой закону, получили название систем программного регулирования. Программа изменения параметра создается специалистами с учетом поставленной задачи регулирования.
• Автоматическая стабилизация. В системах автоматической стабилизации регулируемый параметр при различных возмущениях, которые действуют на систему, стабилизируется регулятором до постоянной величины.
По связи выходного и входного параметра:
• Непрерывные. В ранних примерах было принято, что действие на рабочий орган осуществлялось непрерывно за все время, пока имеется отклонение регулируемого параметра. Такая система называется системой непрерывного действия.
• В дискретных системах действие на рабочий орган производится ступенчато. Для примера можно рассмотреть работу утюга, в котором регулировка принимает одно из двух положений при изменении температуры. В такой системе регулировка температуры производится коммутацией нагревательного элемента по сигналу датчика. При повышении температуры выше предела датчик разрывает контакт и выключает нагреватель. При уменьшении температуры менее определенного значения, нагреватель подключается. Такая система не находится в устойчивом состоянии, и имеет два положения включения: в меньшую или большую сторону.
Для создания качественной регулировки автоматики могут содержать специальные устройства, которые являются обратными связями. В них сигнал направлен в противоположную сторону от основного сигнала управления.
По виду источника энергии:
• Пневматические – обеспечивают высокую скорость, применяют энергию сжатого газа.
• Электрические – удобны в работе и легки в передаче информации и ее обработке.
• Гидравлические – обеспечивают повышенную мощность, применяют энергию жидкости.
Телемеханические системы автоматики
Если компоненты системы находятся далеко между собой, то для соединения применяется передатчик, приемник и каналы связи. Поэтому эти системы называются телемеханическими.
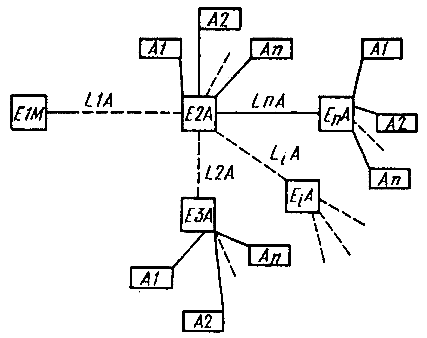
Они состоят из управляющего пункта с оператором, пунктов контроля с объектами контроля А1-Ап, каналов передачи L1А-LпА, которые соединяют управляющий пункт Е1М с контрольными пунктами Е2А-Еп. В системе телемеханики по каналам передачи можно передавать многие виды информации.
Система телеизмерения
Если информация передается только о контрольном объекте, то системы называют телеизмерением. В них сигналы от датчика передаются на управляющий пункт Е1М, преобразуются в показания цифровых или стрелочных измерительных приборов. При этом передача информации может происходить непрерывно или с перерывами.
Система телесигнализации
Если от датчика поступает сигнал на пункт управления только о том, включен объект контроля или выключен, такие системы автоматики называются системами телесигнализации.
Телесигнализация выдает данные по управлению объектом контроля, либо служит информацией для решения по управлению в системах телерегулировки и телеуправления. Главным отличием этих систем от других заключается в непрерывности и дискретности сигналов.
Автоматическое управление
Первоначально ТАУ развивалась как теория автоматического регулирования (ТАР) и была одним из разделов теоретической и технической механики. На этой стадии ТАУ изучала процессы управления паровыми котлами и электрическими машинами, но раздельно в пределах только теплотехники и только электротехники. Быстрое развитие всех отраслей техники и промышленности сопровождалось совершенствованием методов и средств техники управления; обнаружилась аналогичность процессов управления в технических устройствах, независимо от их природы и назначения. С развитием управления в технике шло также изучение проблем управления в организмах и в экономических системах. Вплоть до середины 20 в. исследования процессов управления в этих разнородных объектах не были связаны. В технике управляющие устройства, внешние по отношению к объектам, создаются отдельно и лишь затем соединяются с объектами в единую систему управления. На основе изучения взаимодействия этих устройств с объектами была выявлена общность процессов управления. Именно поэтому ТАР зародилась в технике и превратилась в самостоятельную техническую науку. В живых организмах и в экономике органы управления составляют неотъемлемую часть этих объектов. Здесь нет необходимости конструирования отдельно действующих органов управления, а изучение всего механизма управления велось разрозненно в соответствующих областях знаний без участия специалистов по управлению. Однако процессы управления, обладающие определенной спецификой в биологии и экономике, потребовали обязательной коллективной работы специалистов различных областей науки и техники, тем более при современном уровне развития науки, когда выявилась также и необходимость взаимного обмена знаниями. Н. Винеру принадлежала мысль об общности процессов управления в технике, живых организмах и в экономике и необходимости совместной деятельности учёных различных специальностей (см. Кибернетика). Этот вывод подготовлялся длительное время и многими другими исследователями. Было обнаружено, что техническая наука — ТАР, способна объяснить процессы управления и влиять на них не только в технике; сфера её применения расширилась, но при этом усложнились цели и методы теории, которая получила новое название «Теория автоматического управления». Для ТАР характерна задача стабилизации заданного состояния объекта. В ТАУ эта задача входит составной частью в проблему приспособления, или адаптации, которая присуща живым организмам и экономическим организациям. Но и для техники эти проблемы весьма актуальны, если учесть переменность параметров объектов управления, работу их при меняющихся условиях, а также оценку эффективности этой работы в чисто экономических терминах, например прибыльность или уменьшение затрат труда и материалов. Так возникла проблема синтеза и анализа систем автоматического управления — основная проблема ТАУ. Решение её требует изучения динамических свойств САУ, для чего необходимо математическое описание поведения всех элементов системы в переходных процессах. В общем случае процессы в объектах описываются системами обыкновенных дифференциальных уравнений или уравнений в частных производных в зависимости от того, имеют ли объекты сосредоточенные или распределенные параметры. Элементы автоматических устройств также описываются системами дифференциальных уравнений. Специфичен для ТАУ последующий переход от линейных уравнений к передаточным функциям — операторным выражениям дифференциальных и разностных уравнений. Передаточные функции позволяют легко представить математическую модель системы в виде структурной схемы, состоящей из типовых динамических звеньев. ТАУ вводит понятия динамических характеристик — передаточных функций, частотных и временных характеристик, упрощающих составление математических моделей системы и последующие анализ и синтез систем. Динамический анализ САУ выясняет их работоспособность и точность. Необходимым условием работоспособности САУ служит их устойчивость (см. Устойчивость системы автоматического управления). Для её исследования разработаны критерии устойчивости, позволяющие определять условия устойчивости и необходимые запасы её по косвенным признакам, минуя весьма трудную операцию интегрирования уравнений движения системы. Устойчивость достигается изменением параметров системы и её структуры. В нелинейных САУ исследуется возможный для этих систем режим автоколебаний (См. Автоколебания). Если же по самому принципу действия САУ, например для релейных систем, эти колебания неизбежны, то устанавливаются допустимые параметры — амплитуда и частота автоколебаний. Точность САУ оценивается показателями, которые в совокупности называется качеством управления (см. Точность систем автоматического управления), Важнейшие показатели качества САУ: статические и динамические погрешности и время регулирования (см. Погрешность в системе автоматического регулирования). Эти показатели определяются сравнением действительного переходного процесса изменения управляемых величин с требуемым законом их изменения; обычно они указываются для одного из типовых законов изменения управляемой величины. В ТАУ, так же как и при анализе устойчивости, пользуются косвенными методами анализа качества, не требующими решения исходных уравнений. Для этого вводятся критерии качества — косвенные оценки показателей качества (см. Качества показатели системы автоматического управления). При действии на САУ случайных возмущений наиболее распространён критерий качества динамической точности — средняя квадратичная ошибка. Эта величина относительно просто может быть связана со статистическими характеристиками возмущающих воздействий и параметрами передаточной функции системы. САУ, в которой достигнут экстремум какого-либо показателя качества, именуется оптимальной системой (См. Оптимальная система). Нелинейные системы обладают более широкими возможностями достижения оптимума определённого показателя качества, чем системы линейные. Это обусловило применение нелинейных связей для повышения качества систем управления. Анализ системы управления устанавливает свойства системы с уже заданной структурой. Построение алгоритма управления и разработка соответствующей ему структуры системы, выполняющей заданную цель при требуемом качестве управления, установление значений параметров этой системы составляет содержание проблемы синтеза. До начала разработки системы управления сообщаются необходимые для этого исходные данные: свойства управляемого объекта, характер действующих на него возмущений, цель управления и требуемая точность управления. К объекту управления относится его управляющий орган, через который передаётся воздействие на объект от управляющего устройства. Известные характеристики управляющего органа сразу же определяют характеристики исполнительного механизма управляющего устройства. Но на этом обрывается цепь частей системы управления, свойства которых определяются однозначно их взаимным влиянием друг на друга. Так вводится понятие неизменяемой части системы управления — неизменяемой в том смысле, что свойства её заданы до начала конструирования алгоритма управления и, как правило, не могут быть изменены. Заданная цель управления определяет и способ управления. В результате выясняется в общих чертах блочная схема системы управления. В основном пользуются 2 методами решения проблемы синтеза — аналитическим и последовательных приближений. При первом либо находится вид передаточной функции автоматического устройства или алгоритм управления, либо при выбранной структуре указанного устройства устанавливаются значения его параметров, дающие экстремум критерию качества. Этот метод позволяет сразу найти оптимальное решение, но он часто приводит к сложными громоздким вычислениям. Во втором методе по заданному критерию качества определяется передаточная функция автоматического устройства и затем для полученной системы сравниваются заданные показатели качества с их действительными значениями. Если приближение оказывается допустимым, расчёт считается законченным и можно приступить к конструированию устройства. Если же приближение оказывается недостаточным, то изменяется вид передаточной функции до получения варианта, удовлетворяющего заданным требованиям точности. При построении сложных систем управления, кроме теоретических методов, применяется Моделирование с применением аналоговых и цифровых вычислительных машин, на которых воспроизводятся уравнения, описывающие всю систему управления в целом, и по результатам расчётов, заканчивающихся при достижении требуемых показателей качества, устанавливается структура устройства управления. Такой метод синтеза близок по идее к методу последовательных приближений. Моделирование позволяет оценить влияние таких факторов, как нелинейность ограничения координат, переменность параметров, которые ставят почти непреодолимые преграды для аналитического исследования. Применение вычислительных машин освобождает от трудностей расчёта. Они также используются в составе САУ для выполнения сложных алгоритмов управления, которые особенно характерны для адаптивных и оптимальных систем и систем с прогнозированием конечного результата управления. Решение проблемы синтеза САУ способствовало появлению новых эффективных принципов управления и развитию важных самостоятельных направлений в ТАУ: оптимальное управление, статистичная динамика и чувствительность систем управления. Теория оптимального управления позволила установить структуры систем управления, обладающих предельно высокими показателями качества при учёте реальных ограничений, накладываемых на переменные. Показатели оптимальности могут быть весьма разнообразными. Выбор их зависит от конкретно поставленной задачи. Такими показателями служат показатели динамических свойств всей системы в целом, критерии экономичности режимов управляемых объектов и др. Распространены оптимальные по быстродействию системы, которые переводят объект из одного состояния в другое за минимальный промежуток времени.