Электропривод – электромеханическая система, служащая для привода в движение функциональных органов машин и агрегатов для выполнения определенного технологического процесса. Электрические приводы состоят из электродвигателя, устройства преобразования, управления и передачи.
С прогрессом промышленного производства электрические приводы заняли в быту и на производстве лидирующую позицию по числу электродвигателей и общей мощности. Рассмотрим структуру, типы, классификацию электроприводов, и предъявляемые к нему требования.
- Устройство
- Свойства привода
- Электрические приводы. Классификация
- Подбор электродвигателя
- При подборе электродвигателя для привода агрегатов целесообразно следовать некоторым советам по:
- Преимущества
- Технические требования
- Электрогидравлические приводы
- Общее устройство, компоновка автолестницы АЛ-30(131)ПМ-506В
- Электрический привод
- Классификация электроприводов
- Подбор электродвигателя
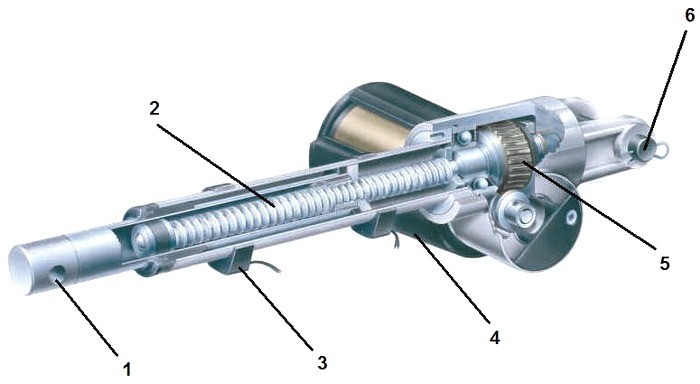
Устройство

1 — Передний крепеж
2 — Винтовая передача
3 — Концевой датчик
4 — Электродвигатель
5 — Зубчатая передача
6 — Задний крепеж
Функциональные компоненты
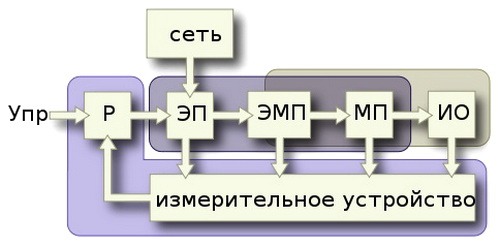
- Р – регулятор служит для управления электроприводом.
- ЭП – электрический преобразователь служит для преобразования электроэнергии в регулируемую величину напряжения.
- ЭМП – электромеханический преобразователь электричества в механическую энергию.
- МП – механический преобразователь способен изменять быстродействие и характер движения двигателя.
- Упр – управляющее действие.
- ИО – исполнительный орган.
Функциональные части
- Электропривод.
- Механическая часть.
- Система управления.
Исполнительный механизм является устройством, которое смещает рабочую деталь по поступающему сигналу от управляющего механизма. Рабочими деталями могут быть шиберы, клапаны, задвижки, заслонки. Они изменяют количество поступающего вещества на объект.
Рабочие органы могут двигаться поступательно, вращательно в определенных пределах. С их участием производится воздействие на объект. Чаще всего электропривод с исполнительным механизмом состоят из электропривода, редуктора, датчиков положения и узла обратной связи.
Сегодня электрические приводы модернизируются по их снижению веса, эффективности действия, экономичности, долговечности и надежности.
Свойства привода
- Статические. Механическая и электромеханическая характеристика.
- Механические. Это зависимость скорости вращения от момента сопротивления. При анализе динамических режимов механические характеристики полезны и удобны.
- Электромеханические. Это зависимость скорости вращения от тока.
- Динамические. Это зависимость координат электропривода в определенный момент времени при переходном режиме.
Электрические приводы. Классификация
Электроприводы обычно классифицируются по различным параметрам и свойствам, присущим им. Рассмотрим основные из них.
По виду движения
- Вращательные.
- Поступательные.
- Реверсивные.
- Возвратно-поступательные.
По принципу регулирования
- Нерегулируемый.
- Регулируемый.
- Следящий.
- Программно управляемый.
- Адаптивный. Автоматически создает оптимальный режим при изменении условий.
- Позиционный.
По виду передаточного устройства
- Редукторный.
- Безредукторный.
- Электрогидравлический.
- Магнитогидродинамический.
По виду преобразовательного устройства
- Вентильный. Преобразователем является транзистор или тиристор.
- Выпрямитель-двигатель. Преобразователем является выпрямитель напряжения.
- Частотный преобразователь-двигатель. Преобразователем является регулируемый частотник.
- Генератор-двигатель.
- Магнитный усилитель-двигатель.
По методу передачи энергии
- Групповой. От одного мотора через трансмиссию приводятся в движение другие исполнительные органы рабочих машин. В таком приводе очень сложное устройство кинематической цепи. Электрические приводы такого вида являются неэкономичными из-за их сложной эксплуатации и автоматизации. Поэтому такой привод сегодня не нашел широкого применения.
- Индивидуальный. Он характерен наличием у каждого исполнительного органа отдельного электродвигателя. Такой привод является одним из основных на сегодняшний день, так как кинематическая передача имеет простое устройство, улучшены условия техобслуживания и автоматизации. Индивидуальный привод нашел популярность в современных механизмах: сложных станках, роботах-манипуляторах, подъемных машинах.
- Взаимосвязанный. Такой привод имеет несколько связанных электроприводов. При их функционировании поддерживается соотношение скоростей и нагрузок, а также положение органов машин. Взаимосвязанные электрические приводы необходимы по соображениям технологии и устройству. Для примера можно назвать привод ленточного конвейера, механизма поворота экскаватора, или шестерни винтового пресса большой мощности. Для постоянного соотношения скоростей без механической связи применяется схема электрической связи нескольких двигателей. Такая схема получила название схемы электрического вала. Такой привод используется в сложных станках, устройствах разводных мостов.
По уровню автоматизации
- Автоматизированные.
- Неавтоматизированные.
- Автоматические.
По роду тока
- Постоянного тока.
- Переменного тока.
По важности операций
- Главный привод.
- Вспомогательный привод.
Подбор электродвигателя
Чтобы приводы производили качественную работу, необходимо правильно выбрать электрический двигатель. Это создаст условия долгой и надежной работы, а также повысит эффективность производства.
При подборе электродвигателя для привода агрегатов целесообразно следовать некоторым советам по:
- Требованиям технологического процесса выбирают двигатель с соответствующими характеристиками, конструктивного исполнения, а также метода фиксации и монтажа.
- Соображениям экономии подбирают надежный, экономичный и простой двигатель, который не нуждается в больших расходах на эксплуатацию, имеет малый вес, низкую цену и небольшие размеры.
- Условиям внешней среды и безопасности подбирают соответствующее исполнение мотора.
Правильный подбор электродвигателя обуславливает технико-экономические свойства всего привода, его надежность и длительный срок работы.
Преимущества
- Возможность более точного подбора мощности двигателя для электропривода.
- Электрический мотор менее пожароопасен в отличие от других типов двигателей.
- Приводы дают возможность быстрого пуска и остановки механизма, его плавного торможения.
- Нет необходимости в специальных регуляторах питания для электродвигателя. Все процессы происходят в автоматическом режиме.
- Приводы дают возможность подбора мотора, свойства которого лучше других моделей сочетаются с характеристиками агрегата.
- С помощью электрического привода можно плавно регулировать обороты механизма в определенных пределах.
- Электродвигатель может преодолеть большие и долговременные перегрузки.
- Электропривод дает возможность получения максимальной скорости и производительности рабочего механизма.
- Электродвигатель дает возможность экономить электричество, а при определенных условиях даже генерировать ее в сеть.
- Полная и простая автоматизация установок и механизмов возможна только с помощью электроприводов.
- КПД электромоторов имеет наибольший показатель по сравнения с другими моделями двигателей.
- Моторы производят с повышенной уравновешенностью. Это дает возможность встраивания их в механизмы машин, делать менее массивным фундамент.
Инновационные электрические приводы все автоматизированы. Системы управления приводом дают возможность рационального построения технологических процессов, увеличить производительность и эффективность труда, оптимизировать качество продукции и уменьшить ее цену.
Технические требования
К любым техническим механизмам и агрегатам предъявляются определенные требования технического плана. Не стали исключением и электроприводы. Рассмотрим основные предъявляемые к ним требования.
Надежность
В соответствии с этим требованием привод должен исполнять определенные функции и заданных условиях в течение некоторого интервала времени, с расчетной вероятностью работы без возникновения неисправностей.
При невыполнении этих требований остальные свойства оказываются бесполезными. Надежность может значительно отличаться в зависимости от характера работы. В некоторых механизмах не требуется долгого времени работы, однако отказ механизма не должен иметь место. Такой пример можно найти в военной промышленности. И другой пример, где наоборот, время службы должно быть большим, а отказ устройства вполне возможен, и не приведет к серьезным последствиям.
Точность
Это требование связано с отличием показателей от заданных. Они не могут превышать допустимые величины. Электроприводы должны обеспечивать перемещение рабочего элемента на определенный угол или за некоторое время, а также поддерживать на определенном уровне скорость, ускорение или момент вращения.
Быстродействие
Это качество привода обеспечивает быструю реакцию на разные воздействия управления. Быстродействие связано с точностью.
Качество
Такая характеристика обеспечивает качество процессов перехода, исполнение определенных закономерностей их выполнения. Качественные требования создаются вследствие особенностей работы машин с электроприводами.
Энергетическая эффективность
Любые производственные процессы преобразования и передачи имеют потери энергии. Наиболее важным это качество стало в применении электроприводов механизмов, приводах значительной мощности, долгим режимом эксплуатации. Эффективность использования энергии определяется КПД.
Совместимость
Электрические приводы должны совмещаться с работой аппаратуры, в которой они применяются, с их системой снабжения электроэнергией, информационными данными, а также с рабочими элементами. Наиболее остро стоит требование совместимости электроприводов для медицинской и бытовой техники, в радиотехнике.
Электрогидравлические приводы
Широкое распространение в станках и промышленных работах с ЧПУ получили электрогидравлические приводы с управлением от задающих электрических (шаговых) двигателей. Такие двигатели позволяют преобразовывать дискретные электрические сигналы управления, поступающие от электронной системы с ЧПУ, в дискретный поворот выходного вала с определенным углом поворота на каждый импульс, который называется угловым шагом.
Шаговый двигатель обладает высоким быстродействием и развивает на выходном валу крутящий момент, достаточный для перемещения золотника дросселируещего распределителя. Угловой шаг шагового двигателя (типа ШД5-Д1М) составляет 1,5; крутящий момент 40 Н*см; накопленная частота подачи импульсов 8000 имп/с.
Схема электрогидравлического шагового привода вращательного движения (типа Э32Г18-2):
Электрические управляющие импульсы поступают на шаговый двигатель.
Вращение его выходного вала передается на гайку 1, запрессованную от осевого смещения. В зависимости от направления вращения гайки винт 2, связанный с золотником дросселирующего распределителя РДР, перемещается влево или вправо и сдвигает золотник относительно среднего положения. Масло под давлением направляется в рабочие полости гидромотора (М) так, что направление вращения выходного вала гидромотора совпадает с направлением вращения вала ШД.
Винт 2 своим вторым концом связан с валом гидромотора (М) через шлицевую муфту 3. Поэтому при вращении этого вала винт вворачивается в гайку или выворачивается из нее, перемещаясь вдоль оси по направлению к нейтральному положению РДР.
Если вал ШД повернется на какой-либо угол и остановится, то вал гидромотора повернется на такой же угол. Если же вал ШД будет вращаться с постоянной угловой скоростью, то вал гидромотора будет вращаться с такой же частотой, но с некоторым отставанием по углу (рассогласование по положению). После остановки вала ШД, вал гидромотора (М) «догонит» его и остановится в том же угловом положении с точностью менее одного импульса.
Крутящий момент на выходном валу гидромотора в 100 и более раз превышает момент на валу ШД, поэтому элементы привода, представляют собой гидравлический усилитель крутящих моментов.
| Предыдущие материалы: | Следующие материалы:
|
Общее устройство, компоновка автолестницы АЛ-30(131)ПМ-506В
⇐ ПредыдущаяСтр 14 из 36
Автолестница данной модели (рис. 11.11 и 11.12) смонтирована на базовом шасси автомобиля повышенной проходимости ЗиЛ-131 и состоит из следующих основных частей и систем:
• шасси с платформой;
• опорного основания;
• подъемно-поворотного устройства;
• комплекта колен;
• гидравлического привода механизмов поворота, подъема, выдвижения и выравнивания бокового наклона;
• системы управления;
• системы обеспечения безопасности при эксплуатации АЛ (автоматики и блокировок);
• систем связи и освещения;
• комплекта пожарно-технического оборудования.
Рис. 11.11. Общий вид автолестницы АЛ-30(131)ПМ506В: 1 — базовое шасси; 2 — комплект колен; 3 — поворотная рама; 4 — опорные домкраты
Рис. 11.12. Структурная схема автолестницы
На раме опорного основания смонтировано подъемно-поворотное устройство(рис. 11.13, 11.14), с помощью которого осуществляются движения лестницы в горизонтальной и вертикальной плоскостях, т. е. производится подъем и поворот лестницы. Подъемно-поворотное устройство состоит из:
• поворотного круга;
• поворотной рамы, шарнирно соединенной с подъемной рамой.
Рис. 11.13. Подъемно-поворотное устройство: 1 — привод поворота; 2 — подъемная рама; 3 — гидроцилиндр подъема; 4 — поворотная рама; 5 — привод выдвижения; 6 — гидроцилиндр бокового выравнивания; 7 — гидрозамок гидроцилиндров подъема; 8 — осевой коллектор; 9 — поворотная опора
Рис. 11.14. Механизм (привод) поворота лестницы: 1 — редуктор; 2 — гидромотор; 3 — ведущая шестерня; 4 — вал; 5 — неподвижный круг
Поворотный круг представляет собой крупногабаритный подшипник на цилиндрических роликах с текстолитовыми сепараторами.
На верхней вращающейся части поворотного круга установлены:
• поворотная рама;
• гидроцилиндры подъема;
• привод поворота;
• масло- и токопереходы;
• пульт управления.
На подъемной раме установлен комплект колен, а в поворотной раме размещены механизмы и агрегаты гидропривода и узлы системы автоматики и блокировок.
Рис. 11.15. Схема выдвигания колен лестницы: 1 — первое колено; 2 — второе колено; 3 — канат сдвигания первого колена; 4 — третье колено; 5 — канат сдвигания второго колена; б — четвертое колено; 7 — блок; 8 — барабан; 9, 12, 14 -стяжные муфты; 10 — канат выдвигания третьего колена; 11 — канат выдвигания второго колена; 13 — канат выдвигания первого колена
Сдвигание колен происходит под действием их собственного веса.
Принцип работы автолестницы заключается в подаче ее вершины в необходимую точку пространства в пределах поля движения (обслуживания), контролируемого системой автоматики (рис. 11.16). Системы автоматики и блокировки, обеспечивают безопасность работы на автолестнице.
Рис. 11.16. Поле движения автолестницы
Гидравлический привод АЛ и АКП обеспечивает выполнение всех движений с помощью гидромеханизмов подъема, выдвигания и поворота комплекта колен. Необходимое рабочее давление жидкости в рабочих органах системы (гидромоторы, гидроцилиндры) создается аксиально-поршневым насосом (рис. 11.17).
Рис. 11.17. Устройство насоса аксиально-поршневого типа: 1, 7, 15 — уплотнительные кольца; 2 — втулка; 3 — вал; 4 — манжета; 5 — крышка; 6 — упорное кольцо; 8, 9 — подшипники; 11-шатун; 12-поршень; 13-блок цилиндров; 14 — распределитель; 16 — крышка; 17 — центральный шип
При вращении вала поршни, установленные в блоке цилиндров, вращаются относительно оси блока и одновременно совершают возвратно-поступательные движения. За один оборот вала каждый поршень совершает один двойной ход. При этом за одну половину оборота вала поршень всасывает рабочую жидкость, а за другую — вытесняет ее в гидросистему. Синхронизация вращения вала и блока цилиндров обеспечивается шатунами.
Гидромоторы механизмов поворота и выдвигания комплектов колен АЛ по устройству не отличаются от гидронасосов. Если рабочая жидкость, нагнетаемая из гидросистемы, будет подаваться через отверстие в крышке и паз распределителя в блок цилиндров, то она приведет в движение поршни, которые через шатуны передадут валу крутящий момент.
Принципиальная гидравлическая схема АЛ представлена на рис. 11.18.
Рис. 11.18. Принципиальная гидравлическая схема автолестницы: 1, 2, 5, 33 -гидроцилиндры выдвигания опоры; 3, 6 — гидроцилиндры подъема; 4, 35 -гидроцилиндр блокировки рессор; 7 — гидрозамок гидроцилиндров подъема; 8 — кран разжима захватов; 9, 14 — гидромоторы; 10, 11, 20 — осевой коллектор; 12 — гидроцилиндр бокового выравнивания; 13 — электромагнитный клапан с гидрозамком; 15, 32 — блоки управления; 16, 18 — манометры; 17 — кран разгрузки насоса; 19 — термометр; 21 — фильтр; 22, 25 — краны; 23, 27 — клапаны; 24 — ручной насос; 26, 28 — гидронасосы; 29 — блок клапанов; 30 — гидроцилиндр управления двигателем; 31 — предохранительный клапан; 34 — гидроцилиндр блокировки раздаточной коробки
Электрический привод
Электрический привод (сокращённо — электропривод, ЭП) — управляемая электромеханическая система, предназначенная для преобразования электрической энергии в механическую и обратно и управления этим процессом.
Современный электропривод — совокупность множества электромашин, аппаратов и систем управления ими. Он является основным потребителем электрической энергии (до 60 %) и главным источником механической энергии в промышленности.
В ГОСТ Р 50369-92 электропривод определён как электромеханическая система, состоящая из преобразователей электроэнергии, электромеханических и механических преобразователей, управляющих и информационных устройств и устройств сопряжения с внешними электрическими, механическими, управляющими и информационными системами, предназначенная для приведения в движение исполнительных органов рабочей машины и управления этим движением в целях осуществления технологического процесса.
Как видно из определения, исполнительный орган в состав привода не входит. Однако авторы авторитетных учебников включают исполнительный орган в состав электропривода. Это противоречие объясняется тем, что при проектировании электропривода необходимо учитывать величину и характер изменения механической нагрузки на валу электродвигателя, которые определяются параметрами исполнительного органа. При невозможности реализации прямого привода электродвигатель приводит исполнительный орган в движение через кинематическую передачу. КПД, передаточное число и пульсации, вносимые кинематической передачей, также учитываются при проектировании электропривода.
 Электропривод
Электропривод
Классификация электроприводов
По количеству и связи исполнительных, рабочих органов:
- Индивидуальный, в котором рабочий исполнительный орган приводится в движение одним самостоятельным двигателем, приводом.
- Групповой, в котором один двигатель приводит в действие исполнительные органы РМ или несколько органов одной РМ.
- Взаимосвязанный, в котором два или несколько ЭМП или ЭП электрически или механически связаны между собой с целью поддержания заданного соотношения или равенства скоростей, или нагрузок, или положения исполнительных органов РМ.
- Многодвигательный, в котором взаимосвязанные ЭП, ЭМП обеспечивают работу сложного механизма или работу на общий вал.
- Электрический вал, взаимосвязанный ЭП, в котором для постоянства скоростей РМ, не имеющих механических связей, используется электрическая связь двух или нескольких ЭМП.
По типу управления и задаче управления:
- Автоматизированный ЭП, управляемый путём автоматического регулирования параметров и величин.
- Программно-управляемый ЭП, функционирующий через посредство специализированной управляющей вычислительной машины в соответствии с заданной программой.
- Следящий ЭП, автоматически отрабатывающий перемещение исполнительного органа РМ с заданной точностью в соответствии с произвольно меняющимся сигналом управления.
- Позиционный ЭП, автоматически регулирующий положение исполнительного органа РМ.
- Адаптивный ЭП, автоматически избирающий структуру или параметры устройства управления с целью установления оптимального режима работы.
По характеру движения:
- ЭП с вращательным движением.
- Линейный ЭП с линейными двигателями.
- Дискретный ЭП с ЭМП, подвижные части которого в установившемся режиме находятся в состоянии дискретного движения.
По наличию и характеру передаточного устройства:
- Редукторный ЭП с редуктором или мультипликатором.
- Электрогидравлический с передаточным гидравлическим устройством.
- Магнитогидродинамический ЭП с преобразованием электрической энергии в энергию движения токопроводящей жидкости.
По роду тока:
- Переменного тока.
- Постоянного тока.
По степени важности выполняемых операций:
- Главный ЭП, обеспечивающий главное движение или главную операцию (в многодвигательных ЭП).
- Вспомогательный ЭП.
- Привод передач.
Подбор электродвигателя
Качество работы современного электропривода во многом определяется правильным выбором используемого электрического двигателя, что в свою очередь обеспечивает продолжительную надёжную работу электропривода и высокую эффективность технологических и производственных процессов в промышленности, на транспорте, в строительстве и других областях.
При выборе электрического двигателя для привода производственного механизма руководствуются следующими рекомендациями:
- Исходя из технологических требований, производят выбор электрического двигателя по его техническим характеристикам (по роду тока, номинальным напряжению и мощности, частоте вращения, виду механической характеристики, продолжительности включения, перегрузочной способности, пусковым, регулировочным и тормозным свойствами др.), а также конструктивное исполнение двигателя по способу монтажа и крепления.
- Исходя из экономических соображений, выбирают наиболее простой, экономичный и надёжный в эксплуатации двигатель, не требующий высоких эксплуатационных расходов и имеющий наименьшие габариты, массу и стоимость.
- Исходя из условий окружающей среды, в которых будет работать двигатель, а также из требований безопасности работы во взрывоопасной среде, выбирают конструктивное исполнение двигателя по способу защиты.
Правильный выбор типа, исполнения и мощности электрического двигателя определяет не только безопасность, надёжность и экономичность работы и длительность срока службы двигателя, но и технико-экономические показатели всего электропривода в целом.